感度10倍の超薄型ひずみゲージで医療ロボット実現に弾み
シンガポール国立大学(NUS)の研究チームは、微小な動きを測定する際に10倍の感度を発揮するひずみゲージを開発したと発表した。これらのセンサは超薄型で電池不要、無線でデータを送信できるため、幅広い用途に魅力的なセンサとなっている。

シンガポール国立大学(NUS)の研究チームは、微小な動きを測定する際に10倍の感度を発揮するひずみゲージを開発したと発表した。これらのセンサは超薄型で電池不要、無線でデータを送信できるため、幅広い用途に魅力的なセンサとなっている。
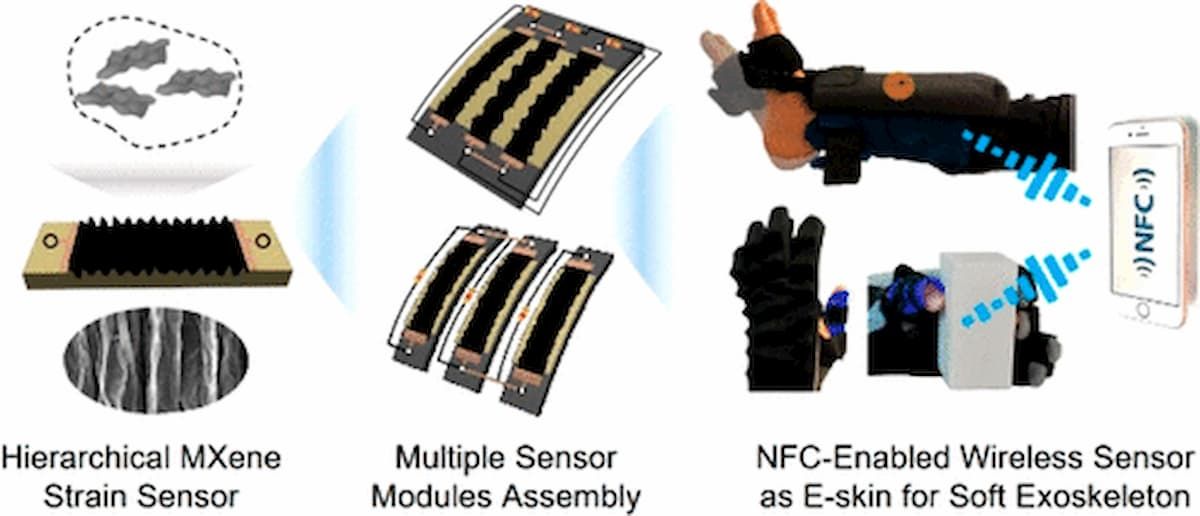
チームが開発したこれらの新しいひずみゲージは、MXenesと呼ばれる柔軟性、伸縮性、導電性のあるナノ材料を用いて作製されており、超薄型で電池不要、無線でデータを送信することができる。これらの望ましい特性を備えたこの新しいひずみゲージは、幅広い用途に使用できる可能性がある。
NUS化学・生体分子工学科のChen助教授は、「従来のひずみゲージの性能は、使用されるセンシング材料の性質上、常に制限されており、ユーザーは特定の用途に合わせてセンサーをカスタマイズできる選択肢が限られていた」と声明で説明している。今回の研究では、MXenesの表面テクスチャを簡単に制御する方法を開発し、様々な軟質外骨格用のひずみセンサのセンシング性能を制御することが可能になった。本研究で開発されたセンサ設計原理は、電子スキンやソフトロボットの性能を大幅に向上させることができる。
カスタマイズ可能な超高感度センサー
この技術的なブレークスルーは、NUSの研究者が、高いS/N比を持つ広いワーキングウィンドウで、高度にカスタマイズ可能な超高感度センサーを作成することを可能にする製造プロセスを開発したことでもたらされた。センサーの動作ウィンドウは、センサーの特性を維持しながらどれだけ伸ばせるかを決定し、高いS/N比を持つことは、センサーがロボットアームの微妙な振動と微細な動きを区別できるため、より高い精度を意味する。
この製造プロセスにより、チームは高感度と信号対雑音比を維持しながら、0~900%の間の任意の作業ウィンドウにセンサをカスタマイズすることができる。標準的なセンサーでは、通常100%までの範囲を達成することができる。NUSの研究者は、異なる動作窓を持つ複数のセンサーを組み合わせることで、他の方法では実現不可能な単一の超高感度センサーを作成することができる。
研究チームは、この画期的な技術を開発するのに2年を要し、その後、2020年9月に科学誌「ACS Nano」に発表した。
また、彼らは、ソフトロボットによるリハビリ用手袋にソフト外骨格を応用した作業用プロトタイプも持っている。「これらの高度な柔軟性のあるセンサーは、私たちのソフトウェアラブルロボットに、患者の運動性能、特に可動域を感知する上で重要な能力を与える。これにより、最終的にはソフトロボットが患者の能力をよりよく理解し、患者の手の動きに必要な支援を提供することが可能になる」と、NUS生物医学工学科のソフトロボット研究室を率いるRaye Yeow准教授は語った。
また、ひずみゲージの能力を向上させ、シンガポールの総合病院と連携して、リハビリ用の軟質外骨格ロボットや、経口腔ロボット手術用の手術ロボットへの応用を模索しているという。
参考文献
- Haitao Yang, Xiao Xiao, Zhipeng Li, Kerui Li, Nicholas Cheng, Shuo Li, Jin Huat Low, Lin Jing, Xuemei Fu, Sippanat Achavananthadith, Fanzhe Low, Qian Wang, Po-Len Yeh, Hongliang Ren, John S. Ho, Chen-Hua Yeow, Po-Yen Chen. Wireless Ti3C2Tx MXene Strain Sensor with Ultrahigh Sensitivity and Designated Working Windows for Soft Exoskeletons. ACS Nano, 2020; 14 (9): 11860 DOI: 10.1021/acsnano.0c04730
Image by Haitao Yang, et al.
Special thanks to supporters !
Shogo Otani, 林祐輔, 鈴木卓也, Mayumi Nakamura, Kinoco, Masatoshi Yokota, Yohei Onishi, Tomochika Hara, 秋元 善次, Satoshi Takeda, Ken Manabe, Yasuhiro Hatabe.
コーヒー代支援 / サポーター加入
Axionは吉田が2年無給で、1年が高校生アルバイトの賃金で進めている「慈善活動」です。有料購読型アプリへと成長するプランがあります。コーヒー代のご支援をお願いします。個人で投資を検討の方はTwitter(@taxiyoshida)までご連絡ください。プロジェクトの詳細は以下を参照くださいませ。



