たった60分で歩行を学習するロボットをUCバークレーが発表
カリフォルニア大学バークレー校の研究チームは、ロボットに60分以内で歩き方を教える手法を発表した。この手法では、シミュレーターを使わずにロボットを訓練することができるという点で、従来の深層強化学習の手法とは異なっている。

カリフォルニア大学バークレー校の研究チームは、ロボットに60分以内で歩き方を教える手法を発表した。この手法では、シミュレーターを使わずにロボットを訓練することができるという点で、従来の深層強化学習の手法とは異なっている。
手法の名称は「DayDreamer」。World Models for Physical Robot Learning」と名付けられたこのプロジェクトは、Philipp Wu、Alejandro Escontrela、Danijar Hafner、Ken Goldberg、Pieter Abbeelによって率いられている。著者らによると、Dreamerアルゴリズムは、学習された世界モデルでの計画を通じて少量のインタラクションから学習し、ひいてはビデオゲームにおける純粋な強化学習を凌駕する可能性があるとのことだ。
ロボット工学の基本的な課題の1つは、実世界のシナリオで複雑なタスクを解決する能力をロボットに身につけさせることである。ロボットが試行錯誤を繰り返しながら学習する手法としては、強化学習(RL)が有名である。強化学習に基づく現在のアルゴリズムは、成功する行動を学習するためにシミュレーション環境とのインタラクションを多く必要とするため、実世界の多くのタスクには実用的ではない。
DayDreamerプロジェクトでは、研究者はDreamerアルゴリズムを4台のロボットに適用し、実世界で直接学習させました。彼らは、異なる行動空間、感覚モダリティ、報酬構造などの課題を克服することができた。
論文で発表された成果は以下の通り。
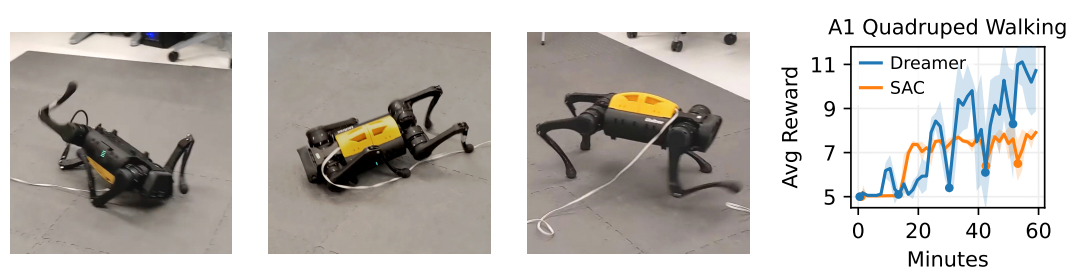
- A1 Quadraped - 研究者は、シミュレータを使わずに、エンドツーエンドの強化学習設定で直接ロボットを訓練した。12個のダイレクトドライブモータで構成されるUnitree A1ロボットをゼロから訓練した。10分以内に、ロボットは押したり引いたりといった外部刺激に耐えられるように適応し、学習することができた。
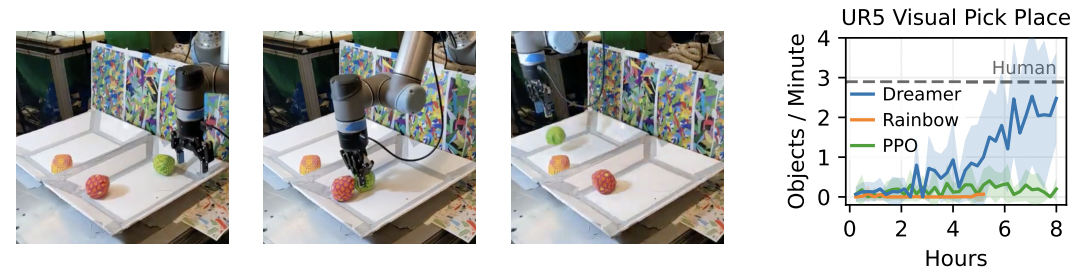
- UR5 Multi-Object visual pick and place - ロボットアームは、ボールを取って置くように訓練されています。このプロセスでは、3人称カメラの画像からボールの位置を特定し、それを把持して指定されたビンに移動させる。Dreamerは、8時間以内に1分間に2.5個の物体をピックする平均速度に到達することができた。
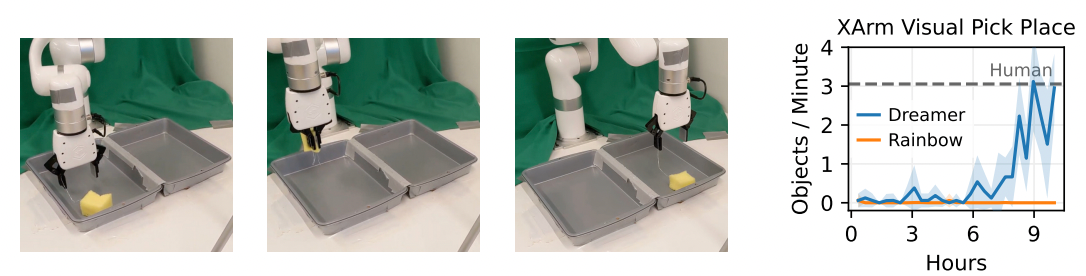
- XArm visual pick and place - XArmでは、チームはRGBと深度モダリティを備えた3人称のRealSenseカメラと、ロボットアーム用の自己認識入力を使用し、ロボットアーム用の自己認識入力と共に、センサーフュージョン学習のためにワールドモデルを必要としました。ここでは、ボールの代わりに柔らかい物体を使用していますが、これはシミュレーションする上で難しいことです。XArmは10時間でこのタスクを完了させることに成功している。
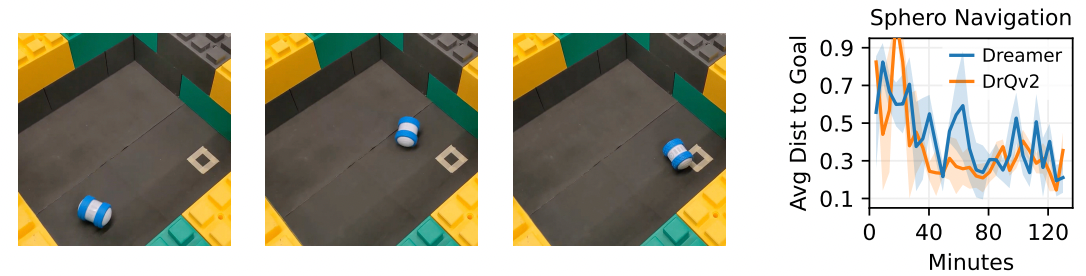
- Sphero Navigation - この課題は、Sphero Ollieというロボットが、トップダウンのRGB画像のみを感覚入力として、連続的な動作により指定された場所にナビゲートするもの。ロボットはピクセルから位置を特定し、過去の一連の画像の助けを借りてその方向を推測し、時間と共に勢いを増す劣駆動のモーターからロボットを制御する。Spero ollieは、このタスクを2時間以内に学習する。
DayDreamerのメーカーより前に、MIT Improbable AI Labの別のグループが同様のプロジェクトCheetahに取り組んでいた。このチームは、当時最速で動く4足歩行ロボットであるmini-Cheetahを開発している。