
ロボティクス
ドリブルできる犬型ロボットが登場
マサチューセッツ工科大学(MIT)の「Improbable Artificial Intelligence Laboratory」の研究者が設計したロボット「DribbleBot」は、サッカーボールをドリブルしてさまざまな路面を移動できる。
ロボット工学は、コンピュータ科学と工学の接点にある学際的な研究分野。ロボット工学には、ロボットの設計、構築、操作、使用が含まれます。ロボティクスの目標は、人間の日常生活を支援し、誰もが安全に過ごせるようなインテリジェントな機械を設計することです。ロボティクスは、情報工学、コンピュータ工学、機械工学、電子工学などの成果を活用しています。 ロボティクスは、人間の代わりとなり、人間の行動を再現できる機械を開発します。ロボットは様々な状況や目的で利用されていますが、現在では危険な環境(放射性物質の検査、爆弾の検知・不活性化など)や製造工程、人間が生存できない場所(宇宙、水中、高熱、危険物や放射線の浄化・封じ込めなど)での利用が多くなってきています。ロボットはどのような形態をとることもできますが、中には人間に似せて作られたものもあります。これは、通常、人間が行う特定の複製行動でロボットを受け入れるのに役立つと言われています。そのようなロボットは、歩行、持ち上げ、発話、認知、またはその他の人間の活動を複製しようとします。
ロボティクス
マサチューセッツ工科大学(MIT)の「Improbable Artificial Intelligence Laboratory」の研究者が設計したロボット「DribbleBot」は、サッカーボールをドリブルしてさまざまな路面を移動できる。

労働経済学
産業ロボットが労働者とその家族に与える影響を分析した最新の研究によれば、ロボットの導入によって、労働参加が減り、雇用が減り、給与が減る。
AI
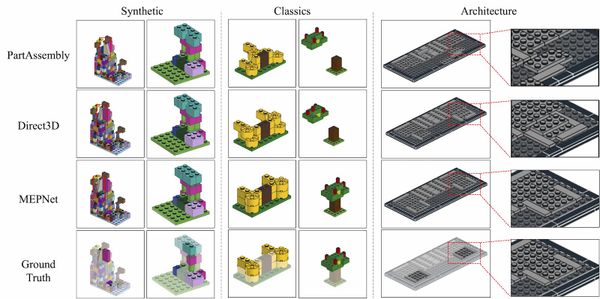
スタンフォード大学、MIT、オートデスクAIラボの研究者が共同で、2Dの指示を解釈して3Dオブジェクトを構築できる、新しい学習ベースのフレームワークを開発した。

ロボティクス
カリフォルニア大学バークレー校の研究チームは、ロボットに60分以内で歩き方を教える手法を発表した。この手法では、シミュレーターを使わずにロボットを訓練することができるという点で、従来の深層強化学習の手法とは異なっている。
宇宙
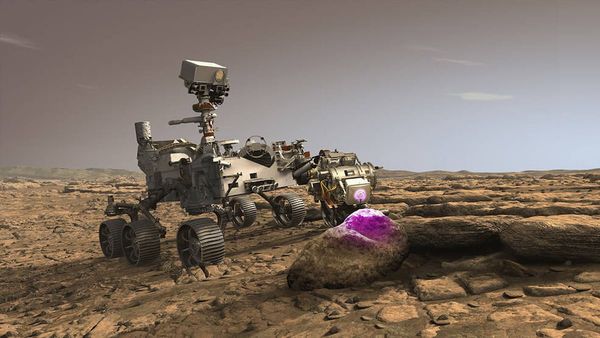
NASAの最新の火星探査機Perseveranceが、6ヶ月間の赤い惑星への飛行の後、2月18日(米国時間)に火星の地表に着陸する準備をしているが、探査機が地形を横断する際には、AIの使用は探査機のミッションを支援することになる。
自律走行車
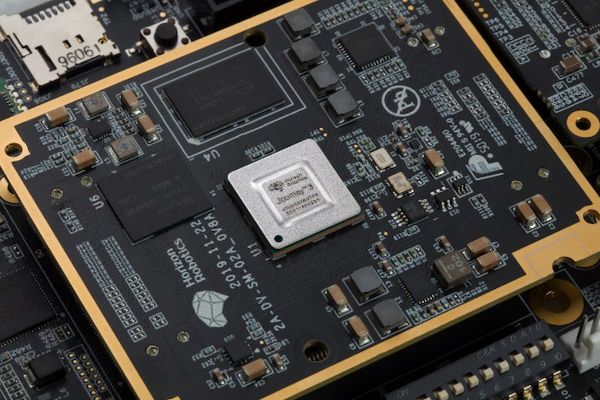
車載AIチップを開発するHorizon Robotics(地平線機器人)は、2020年9月26日に中国・北京で開催された北京オートショーで、自動車インテリジェンスとロボットモビリティのための新世代の効率的なエッジAIプロセッサ「Journey 3」を発表した。

ドローン
自律型ドローンは顧客の家に注文を届けるのではなく、政府によってそのような使用のために承認される駐車場のような約12の指定されたドロップスポットに配信される。

ドローン
今回のテストは、GPS信号が途絶する可能性が高まっているため、人の目線外でのナビゲーションの有用性を検証することを目的としている。故障、太陽フレア、個人による悪意のある行動などがGPS信号を混乱させる可能性がある。
光学
Siフォトニクスの背後にあるシンプルなアイデアは、多くのディスクリート光学部品で構成された複雑なフリースペース光学系を、Siプラットフォーム上のチップスケールのソリューションに置き換えることである。

ドローン
世界の農業の現場では、土壌マッピングや生産マッピングなどの様々な側面や技術、全地球測位システム(GPS)や地理情報システム(GIS)の活用が進み、農作物の空中モニタリングや種や農薬、肥料等の散布作業にドローンが使用されてることは日増しに増えている。

ロボティクス
手術におけるロボット工学の応用は、1980年代に始まって以来、着実に成長してきた。対照的に、この分野における人工知能の統合はまだかなり新しいものだ。主に研究開発段階にある有望な応用が表面化してきている。
ロボティクス
2020年の北米におけるロボットユニットの販売台数が2019年から3.5%増加したことで、初めて非自動車部門のロボットの年間受注台数が自動車用ロボットの受注台数を上回った。