カールスルーエ工科大、データを可視化してロボットの設計を改善するのに役立つARを開発
カールスルーエ工科大学の研究者たちは、ロボット工学ソフトウェアフレームワークのための可視化ツールとして、モバイルデバイスやMicrosoftのHoloLensのようなヘッドアップディスプレイ用の拡張現実(AR)アプリを開発した。

Robot Operating System(ROS)は、地球上で最も堅牢で人気のあるロボット工学ソフトウェアフレームワークの1つ。しかし、その可視化ツールはやや不足しており、カールスルーエ工科大学の研究者たちは、モバイルデバイスやMicrosoftのHoloLensのようなヘッドアップディスプレイ用の拡張現実(AR)アプリを開発することになった。
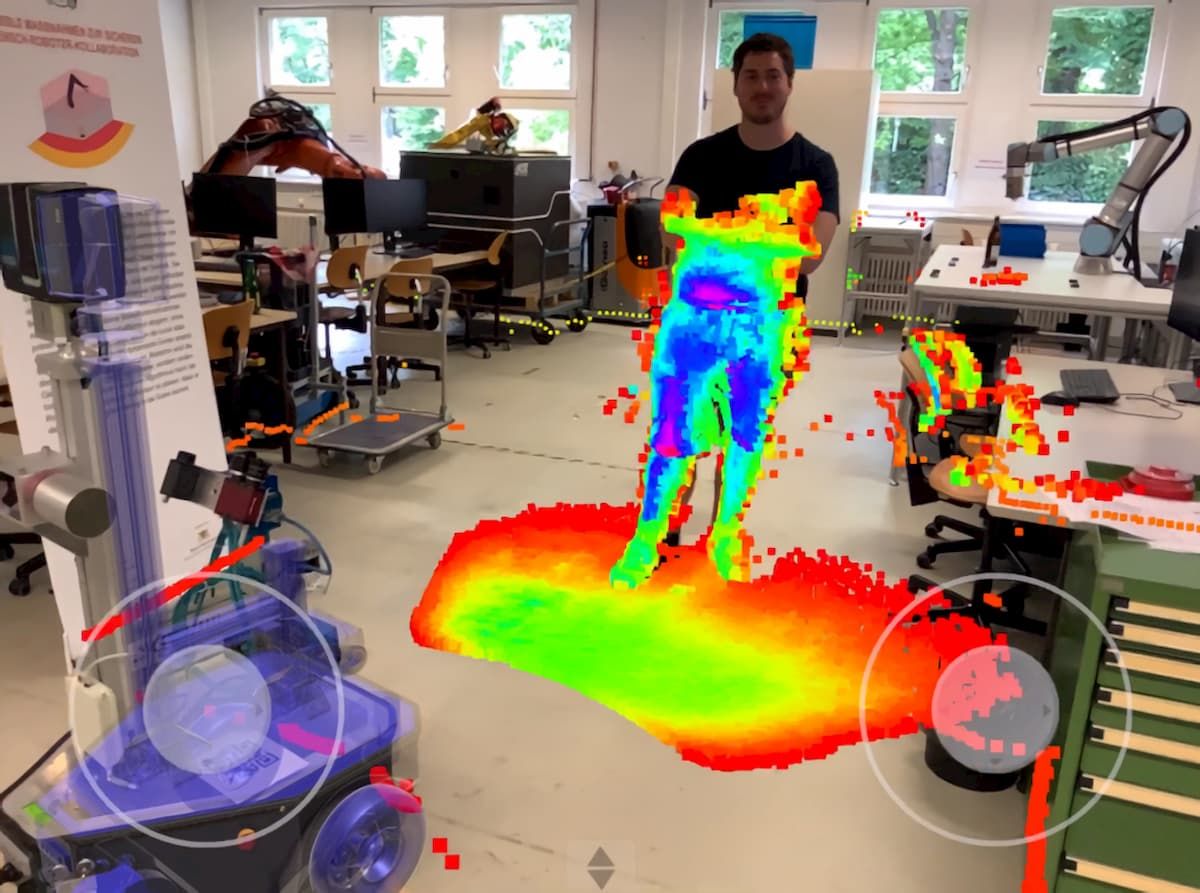
Unityで開発され、Ivizと名付けられたこのオープンソースのアプリは、点群やインタラクティブなマーカーなど、ROSデータのためのさまざまな可視化をロボット技術者が見ることができる。
ロボット工学では、ロボットによって記録、生成、分析された情報は、通常、近くの物理的な位置に縛られている。このデータをその場で可視化することができれば、ロボット開発の指針となる有用な文脈の手がかりを提供することができる。さらに、ARは特定のタスクを完了するまでの時間を短縮し、ミスを減らすことができることが研究で示されている。
Ivizは、Windows、Linux、MacOS、iOS、Androidをサポートしている。モジュールでは、シミュレーション中のロボットをARで可視化し、目標とする関節の位置、把持するオブジェクト、シーンの移動可能な原点などを表すインタラクティブなマーカーでアノテーションすることができる。このモジュールは、仮想ジョイスティックによる遠隔操作をサポートしており、Ivizユーザは実世界のロボットを操作し、ライダセンサの視野内のオブジェクトの上にライダ点群を重ねて表示するなどのデータを視覚化することができる。
Ivizは、線、点群、複製されたメッシュなどのオブジェクトをレンダリングするディスプレイ、または再利用可能なコードのアイデアを中心に構築されている。研究者が説明するように、Ivizはオブジェクトを破棄して再作成するのではなく、廃棄されたオブジェクトを再利用するため、多くのオブジェクトを一度にレンダリングすることで発生する計算コストを回避することができり。例えば、立方体で作られたフレーム軸が不要になった場合、Ivizは立方体のコンポーネントをロボットのリンクとして再利用する。
「モバイルROSプラットフォームを持つことには多くのメリットがあります。ARを使用することで、ロボットや環境とのインタラクションの新しい、より直感的な形の可能性が開ける」と、研究者たちはIvizのデザインを説明する論文に書いている。「さらに、Unity環境では、VRアプリケーションに簡単に移植することができ、これが今後の研究の次のステップとなります」
Image Credit: "iviz: A ROS Visualization App for Mobile Devices".



