Lidar on a chipとは
LiDAR on a chipとは、半導体チップ上にレーザー、電子機器、検出器、光ビームステアリング機構などを集積したシステムを指す。


現在、光検出測距(LiDAR)の3Dセンシングは、干渉法、三角測量、ステレオビジョン、構造化光再構成、LiDARなどの様々なアプローチによって実現することができるが、これらに限定されるものではない。LiDARは、反射から奥行き情報を計算するために、光波、多くの場合はレーザー光を使用してシーンを照らすことに重点を置いている。
LiDARセンサは、自律的な機械が非常に高い精度で世界を見て航行することを可能にする大きな可能性を秘めている。しかし、現在の技術にはいくつかの欠点があり、広く普及する前に対処する必要がある。LiDARセンサは、波長850~1550nmの光ビームを走査(スキャン)し、反射した光信号を利用して関心領域の3次元地図を作成することで空間情報を提供する。日中と夜間の両方の条件で、高解像度で曖昧さのない測距・速度情報を提供することで、カメラやレーダーを補完する。
この種の情報は、自律走行車が他の車両、自転車、歩行者、道路上の潜在的に危険な障害物を検出し、その周囲を安全に航行できるようにするために非常に重要だ。しかし、LiDARを自律走行車やロボットに広く使用するためには、LiDARユニットを大量に製造可能で、高性能で、1台数千ドルの現行の商用システムに比べて2桁の低コストである必要がある。過去10年間で業界では大きな進歩があったが、業界のすべてのニーズを同時に満たすことができるLiDARセンサはまだない。
実行可能なLiDARソリューションは、自動車用電子機器サプライヤーの世界的な連合体であるAutomotive Electronics Councilが策定したガイドラインに基づき、複数年の信頼性を実証する必要がある。多くの商用ライダシステムがこれらの基準を満たしているが、現在までにすべての要件を満たしているものはない。
これまでのところ、自律走行車や自律システムは、主に可動部品を使用して光ビームを操舵するLiDARに頼ってきた。最も一般的に使用されているLiDARの設計は、機械的に回転するステージ上にレーザー、光学系、電子機器、検出器の配列で構成されている。これらの部品をすべて組み立て、調整する必要があるため、コストが高く、製造量が比較的少なく、機械部品の摩耗や損傷が長期的な信頼性に疑問を投げかけている。
数万台規模で生産されたこれらのLiDARシステムは、自律走行車の分野を前進させてきたが、ユビキタス展開には適していない。これらの理由から、可動部品を排除し、より信頼性が高く、大量生産が可能で単価の安い小型設計への移行が大きく後押しされている。
ソリッドステートとLiDARオンチップ
LiDAR設計には、この技術の信頼性と拡張性の課題に対処するための2つの概念がある。第一に「ソリッドステート」(固体)とは、可動部品を使用しない固体型LiDARセンサのことだ。第二に、LiDAR on a chipとは、半導体チップ上にレーザー、電子機器、検出器、光ビームステアリング機構などを集積したシステムを指す。LiDAR on a chipシステムはソリッドステートシステムのさらに先を行っており、これらの設計はすべての主要コンポーネントを可能な限り小さく統合することで、サイズ、重量、電力要件をさらに削減しようとしている。
このシステムの小型化により、アセンブリの複雑さが軽減され、大容量のスループットが可能になり、スケールで10~100倍のコスト削減が可能になる。これは、LiDAR on a chip アーキテクチャが、半導体業界で確立されたCMOS互換性のある材料とウェハスケールの製造方法をフルに活用できるからこそ可能になる。最終的なソリューションが実証されれば、コンピュータやスマートフォンの集積回路と同様に、年間数億個のライダが製造されることが期待されている。
このシリコンフォトニクスは、半導体産業で利用される微細加工技術を用いてシリコン基板上に発光素子や受光器、光変調器といった素子を集積する技術の研究と応用を追究する分野である。これは、集積フォトニクスの一種であり、多くの場合、シングルチップ上に1つ以上の光学素子や機能をモノリシックに集積することを意味する。最初の商業的に成功した統合フォトニクス製品は、外部変調レーザまたは電気吸収変調レーザの略であるInPベースのEMLであろう。これは1980年代後半に開発され、約10年後に商業化され、現在では多くの通信アプリケーションで広く使用されている。Siフォトニクスの台頭は、アプリケーションだけでなく、集積規模の面でもフォトニクス集積化のペースを大幅に加速させている。
ほとんどのシリコンフォトニクスLiDAR(Lidar on a chip)は、特定のユニークな価値提案を提供することによって、自動車アプリケーションに焦点を当てている。シリコンフォトニクスの背後にあるシンプルなアイデアは、多くのディスクリート光学部品で構成された複雑なフリースペース光学系を、シリコンプラットフォーム上のチップスケールのソリューションに置き換えることである。LiDARのための複雑な光学系は完璧な目標である。
LiDAR on Chipの種類
ユビキタスLiDARのビジョンを実現するために、これまでソリッドステートLiDARとLiDAR on a chip設計のアプローチがいくつか登場してきた。主なアプローチには以下のようなものがある。
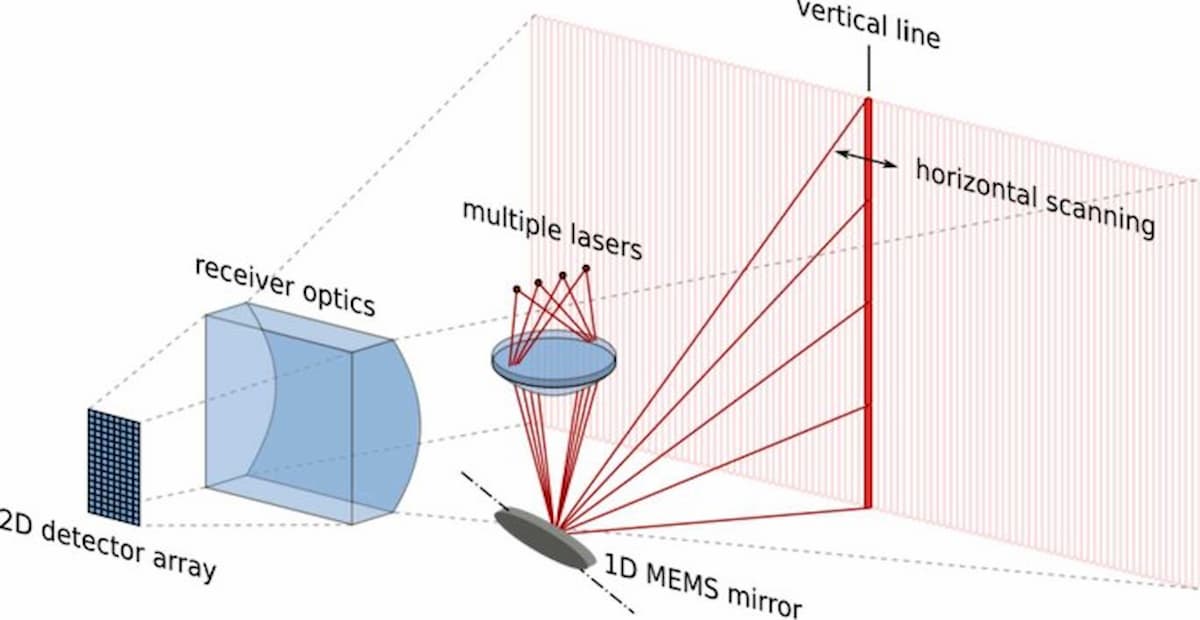
マイクロエレクトロメカニカルシステム (MEMs)
このアプローチでは、レーザまたはレーザアレイの自由空間ビームステアリングのために、光学系とミリスケールの偏向ミラーのアセンブリを使用する。MEMSミラーは半導体ウエハ製造を用いて製造されているが、レーザ、MEMSミラー、光学系の間で光学的なアライメントが必要となるため、アーキテクチャ自体は完全に統合されたライダオンチップシステムではない。
この設計におけるトレードオフの1つは、走査速度と開口部/ミラーサイズの最大操舵角の間にあり、これは検出範囲に直接関係する。このトレードオフは、MEMSミラーがバネのような働きをするため、サイズと質量が大きくなると共振周波数が低下し、走査速度が制限されるために存在する。
液晶メタサーフェス(LCM)
MEMSシステムに似たアーキテクチャだが、MEMSミラーの代わりに液晶メタサーフェス(LCM)を使用している。LCMは、液晶と混合されたサブ波長散乱体のアレイを使用して、反射されたレーザビームに調整可能な位相面を付与し、ビームステアリングを可能にする。
LCMの設計は、大きな光学開口部と広い視野を持っているが、現在のモジュールは150メートルの範囲に制限されている。LCMのステアリング機構は、MEMsライダーシステムと同様に半導体ウェハー製造プロセスを用いて構築されているが、レーザ入力をLCMの表面に対して斜めに配置する必要があるため、システムは完全にオンチップではない。
光フェーズドアレイ (OPA)
OPAの概念は新しいものではなく、1990年代初頭に液晶などの電気光学媒体を用いてチップスケールのOPA 研究が開始されたが 、商業的な成功には至らなかった。シリコンフォトニクスの研究者や起業家の助けを借りて、OPAの採用が再開された。
このアプローチは、システムの光学部分の安価で大量生産に対応している。各々が電子的な位相制御を必要とする光学アンテナの配列を使用して、操縦可能な光ビームを形成する建設的な干渉パターンを生成する。しかし、発光開口部のサイズが大きくなると、電子的な複雑さが増し、同時に制御される数千個のアクティブな位相シフターが必要となるため、スケーリングが制限される。
光導波路のサイズは、理想的なアンテナ間隔(半波長)に実用的な製造上の制約を与え、そのため光ビームを劣化させ、エイリアシングと呼ばれる効果が発生し、使用可能な水平方向の視野が制限される。最近の設計では、これらの問題を解決するために、アペリオディック導波路の間隔や異なる導波路断面を使用しているが、それぞれが、垂直走査の制限やメインビームの光パワーの低下などのトレードオフを生み出す。
参考文献
- Kailai Li, Meng Li, Uwe D. Hanebeck. Towards High-Performance Solid-State-LiDAR-Inertial Odometry and Mapping. 2020. arXiv:2010.13150 [cs.RO]
- 和田 一実. シリコンフォトニクスの基礎と応用.
- Josué J. López, Thomas Mahony and Samuel Kim. MIT Spinoff Building New Solid-State Lidar-on-a-Chip System. Dec, 2020. IEEE Spectrum.
- Sun, X.; Zhang, L.; Zhang, Q.; Zhang, W. Si Photonics for Practical LiDAR Solutions. Appl. Sci.2019, 9, 4225.
- Yoo, H.W., Druml, N., Brunner, D. et al. MEMS-based lidar for autonomous driving. Elektrotech. Inftech.135, 408–415 (2018). https://doi.org/10.1007/s00502-018-0635-2
Image via Aeva.
Special thanks to supporters !
Shogo Otani, 林祐輔, 鈴木卓也, Mayumi Nakamura, Kinoco, Masatoshi Yokota, Yohei Onishi, Tomochika Hara, 秋元 善次, Satoshi Takeda, Ken Manabe, Yasuhiro Hatabe, 4383, lostworld, ogawaa1218, txpyr12, shimon8470, tokyo_h, kkawakami, nakamatchy, wslash, TS, ikebukurou 太郎.
月額制サポーター
Axionは吉田が2年無給で、1年が高校生アルバイトの賃金で進めている「慈善活動」です。有料購読型アプリへと成長するプランがあります。コーヒー代のご支援をお願いします。個人で投資を検討の方はTwitter(@taxiyoshida)までご連絡ください。

投げ銭
投げ銭はこちらから。金額を入力してお好きな額をサポートしてください。



