Pony.ai トヨタが出資する中国の自律走行ベンチャー
Pony.aiは4年間でOEM、Tier1サプライヤーを投資家と提携相手として獲得してきた。中国とカリフォルニア州で事業を展開する同社は、設立以来10億ドル以上の資金を調達しており、その中にはトヨタからの4億ドルも含まれている。他にもボッシュ、現代などの自動車メーカーやサプライヤーと協力関係を結んでいる。

Pony.aiは2020年11月、シリーズCの資金調達を2億6700万ドルで完了し、企業価値は53億ドル以上になったと発表した。また、新たなパートナーである中国一汽集団有限公司が自律走行車の共同開発に出資したという。2016年12月に設立され、広州に本社を置くPony.aiは、自律走行ソリューションを提供する企業だ。同社は、トヨタ、IDG Capital、Sequoia Chinaなどから出資を受けている。
Pony.aiはカリフォルニア州フリーモントのほか、カリフォルニア州アーバイン、北京、中国広州にオフィスを構えている。同社は、米国と中国市場の両方のためのロボタクシーと自律走行トラックに取り組んでおり、自律走行距離は年間350万キロ以上(2.1百万マイル)を記録している。第3回中国国際輸入博覧会では、提携先の中国トラック製造企業Jiefang(一汽解放汽车)のJ7プラットフォームに載ったハードウェアとソフトウェアの「フルスタック」を展示した。
Pony.aiは4年間でOEM、Tier1サプライヤーを投資家と提携相手として獲得してきた。中国とカリフォルニア州で事業を展開する同社は、設立以来10億ドル以上の資金を調達しており、その中にはトヨタからの4億ドルも含まれている。他にもボッシュ、現代などの自動車メーカーやサプライヤーと協力関係を結んでいる。
Pony.aiは配車と物流(配送)サービスのネットワークの両方で動作するシステムを構築している。同社は2019年に、その自動化技術を長距離トラック輸送市場に適用するために、OEMやサプライヤーと協力している。
しかし、ロボタクシーを中心とした取り組みの方がよく知られているかもしれない。同社は、カリフォルニア州のフリーモントとアーバイン、中国の広州で配車と通勤移動手段のパイロットを開始した。2019年10月、Pony.aiの自動運転システムを搭載した電気自動車Hyundai Konaが、Viaの配車プラットフォームを通じて、公道で顧客を輸送し始めた。常に人間の安全運転手を置いていた、BotRideと呼ばれるこのロボタクシーサービスは2020年1月に終了した。
その後、同社はアーバイン地域でPonyPilotと呼ばれる公共のロボタクシーサービスの運営を開始した。Pony.aiは、COVID-19パンデミックが世界を席巻する中、そのロボタクシーサービスを人のシャトルから荷物の輸送にシフトした。4月には、Pony.aiがeコマースプラットフォームのYamibuyと提携し、アーバインの顧客に自律型ラストマイル配送サービスを提供することを発表した。この新しい配信サービスは、追加の容量を提供するために開始されたオンライン注文の急増に対処するためにCOVID-19パンデミックによって引き起こされた、とPony.aiは說明した。
Pony.aiの自律走行システム
創業者の1人Tiancheng Louが共著者になっている2019年のPony.aiとカルフォルニア大学サンディエゴ校の研究者による論文では、安全性を高めるための自律走行車のコンピューティングシステムの設計を探るため、Pony.aiのレベル4自律運転車両群を利用した検証を行なっている。
この論文によると、Pony.aiのコンピューティングシステムは、様々なセンサーやカーコントロールシステムと相互作用して、定位、知覚、計画と制御の3つの主要な機能を実行する。図2は、最先端のレベル4 AVコンピューティングシステムの一般的な動作フローを示している。
定位(Localization)は、LiDAR、カメラ、GPSから得られた情報に基づいて、高精細地図上で自車の位置を特定する。高精細地図には、車線、樹木、ガードレール、信号機やストップサインの位置など、道路上の静的な情報が保存されている。GPSは、グローバルなスケールでの車両の現在位置の予測を提供するが、このような予測は、道路上の車線内に留まるなどの運転タスクを計算システムが実行できるようにするのに十分な精度ではない。したがって、ローカル環境を正確に解釈するためには、GPS情報をLiDARとカメラの「知覚」を伴う必要がある。
知覚(Peception)は、図1に示すように、LiDAR、カメラ、ミリ波レーダーの3種類のセンサを用いて、周囲の静的な物体(車線、樹木、信号機など)と移動する物体(他の車両や歩行者など)を検出し、解釈する。本稿の残りの部分では、知覚によって検出可能な、すなわち検出範囲内にあるすべての物体を「障害物」と呼ぶ。定位は、典型的には静的な物体の頻度の低い知覚しか必要としないが、交通解釈は、静的な物体と移動する物体の両方の知覚を頻繁に(例えば、フレームごとに-センサによって収集されたデータの各フレームごとに)必要とする。
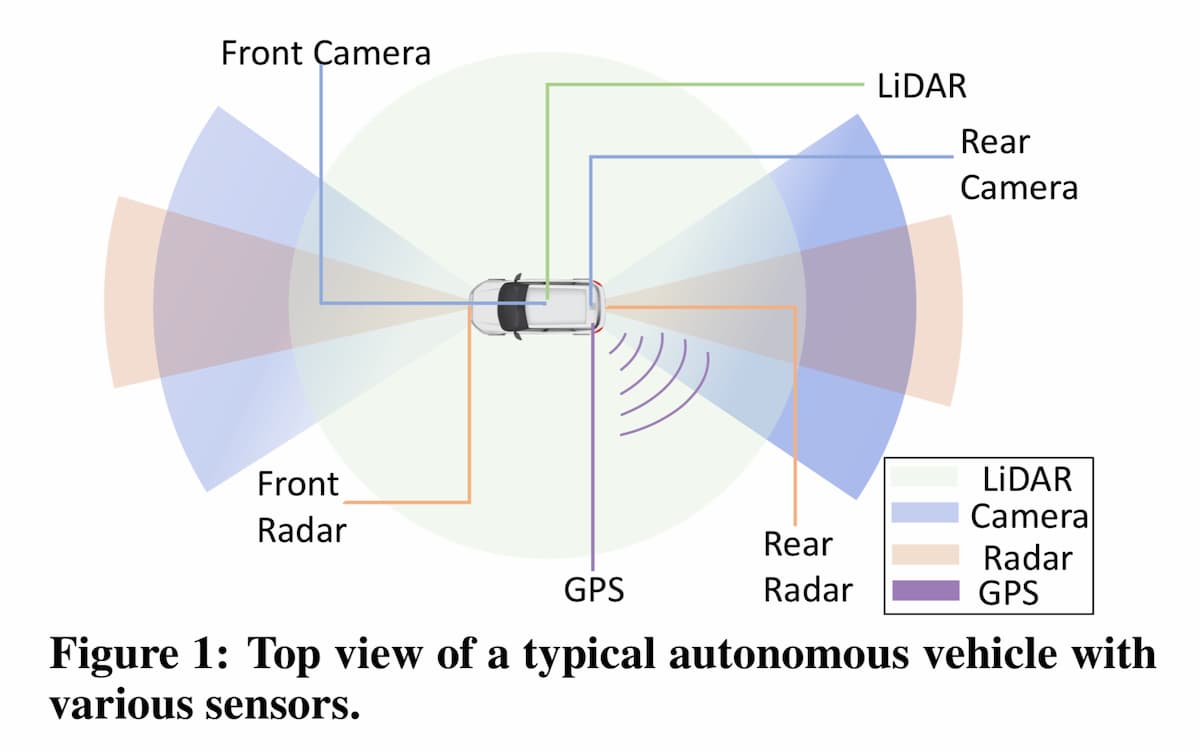
カメラやレーダーと比較して、LiDARは、障害物の位置、3D形状、速度、および移動方向の検出において、はるかに高い精度を提供している。したがって、現在のLevel-4 AVのほとんどは、認識タスクを実行するためにLiDARに大きく依存している。LiDARは、360度の視野にわたってレーザーを放射し続ける。LiDARは、障害物がレーザーを遮ると反射した信号を受信する。受信した信号に基づいて、障害物の位置と3次元形状を表す「点群」を構築することができる。
ほとんどの場合、コンピューティングシステムは、LiDARデータから生成された点群に基づいて障害物の特性を識別することができる。カメラは、色情報をキャプチャすることで障害物の解釈を容易にする。レーダーは移動する障害物の半径方向の速度を検出するために使用される。センサーデータの収集後、コンピューティングシステムは3種類のセンサーからのデータを統合する「センサーフュージョン」を実行する。
全体として、知覚は障害物の位置、形状、速度、移動方向の正確な情報を取得する。このような情報は、計画/制御において、位置を特定し、衝突を回避するための適切な運転判断を行うために不可欠である。
計画と制御(Planning and control)の本質的な機能には、予測、軌道計画、ビークル制御がある。モーションプランナは、定位情報と知覚情報を用いて、車両の操舵角、加速、制動などの運転制御を決定する。モーションプランナにとって機能安全性は非常に重要である。そのため、バックアップ機構、一般的にはレーダーやソナー(音波探知装置)を使用して、システムの他のコンポーネントから情報を得た結論を検証する。認識結果をもとに、予測機能はリアルタイムで障害物の挙動を追跡し、次の動きを予測する。コンピューティングシステムは、予測と知覚の結果に基づいて、車両の最適な軌道を生成する。制御機能は、計画機能が行った運転判断に基づいて、車両の操舵、加減速、減速を制御する。
コンピューティングシステム
前述の論文によると、自律走行車(AV)システムのワークロードは、機械学習と非機械学習(非ML)ソフトウェアモジュールの両方で構成されている。Pony.aiのAVシステムでは、カメラ認識ソフトウェアモジュールは一般的に深層学習ベースのコンピュータビジョンワークロードであるが、Pony.aiののAVシステムのソフトウェアプログラムのほとんどは非MLである。例えば、分類・セグメンテーションモジュールの中には、サポー トベクターマシン(SVM)や完全に接続されたネットワークを利用したものもあり、カメラデータの認識にはResNet(ImageNet2015を圧勝したモデルで、画像認識タスクにおいて、高い予測性能をもつ)を採用しているものもある。「現在、我々のAVシステムで実行されているソフトウェアプログラムの多くは、知覚タスクのためのものであっても、非MLワークロードである」と研究者らは書いている。
さらに、多くのソフトウェアモジュールは、CPUとGPUの両方で同じアルゴリズムを実行することができるが、実装方法が異なるという。これにより、ソフトウェアワークロード間の様々なハードウェアリソースの管理と割り当てに大きな柔軟性がもたらされる。
PonyAlpha
PonyAlphaは、2018年9月に正式に公開されたPonyAlphaの第3世代のAV技術ソリューション。従来のロボットOS(ROS)を使用していた多くの自律走行企業とは異なり、PonyAlphaは創業以来、自律走行システムのアーキテクチャとオペレーティング・プラットフォーム(PonyBrain)の完全なセットを独自に開発した。
ソフトウェア面では、PonyAlphaは自社開発の自律走行システム・アーキテクチャとオペレーティング・プラットフォームであるPonyBrainを利用しており、運用性能を最適化し、高速の反復をサポートしながら、オンボード・コンピューティング環境への最適化と適応性を実現し、オペレーティング・プラットフォームのリアルタイム性能、ジョブ・スケジューリング、データ伝送、スループット効率の向上を実現している。ハードウェア面では、PonyAlphaは、LIDAR、カメラ、ミリ波レーダーなどのセンサーを統合的に適応させることで統合性を向上させ、さまざまな道路状況や運転シナリオに基づいて正確なセンシングデータをインテリジェントに取得することを可能にする。
PonyAlphaはVCC(Vehicle Control Center)を含むフリート運用に合わせたシステムサポートプラットフォームも提供している。 車両の需要、車両数、各車両のシステム版を効果的に構成することができるとともに、道路上の各車両の状態を追跡して検出することができる。
PonyAlpha 2.0
PonyAlpha 2.0は、PonyBrainプラットフォームをベースにPonySmartが開発した自律走行用のソフトウェアとハードウェアを統合した第4世代のシステムで、2019年12月にリリースされる。それは5つの主要なハードウェアの反復を特徴としている。メインLIDARを含むアップグレードされたセンサー構成、独自に研究されたセンサークリーニングシステム、ワイヤ制御変更技術の独立したマスター、改善された全体的なシステム統合と安定性、および利用可能なトランクスペースを含む。
PonyAlpha 2.0は、周囲200m以内の全視野を確保し、複雑な交通区間や朝夕のピーク、特殊な気象条件への対応力を向上させている。また、動的な道路検索アルゴリズムを内蔵しており、各車線の道路状況に基づいて動的な予測・決定最適化が可能で、あらゆる走行ルートをサポートする。
PonyAlpha X
2020年11月に発売された「PonyAlpha X」は、PonyAlphaが標準化を経て製作した初の自律走行ソフトウェアとハードウェアシステム。 ハードウェア面では、PonyAlpha Xは車両の統合性を大幅に向上させ、振動、温度、湿度、電磁干渉に対する耐性を高め、ルーフセンサーユニットの重量を22%削減し、トランクを90%以上使用できる統合設計となっている。
ソフトウェアの面では、システムは200メートルの完全な視野を実現し、ブラインドフィリングLIDARと左方向ミリ波レーダーを使用することで、不感帯の認識を排除し、様々なタイプのロングテールシナリオに対応するシステムの処理品質と応答速度を向上させることができる。 質の高い旅行体験を提供するための技術開発の効率化。
移動サービス
- PonyPilotは、2018年12月にPonyPilotが提供を開始した自動運転モビリティサービスで、広州市南沙の都市部で公道を走るロボタクシーの定期運行を試験的に行い、中国市場で初めてロボタクシーのサービスを提供している。
- Pony Human Interface(PonyHI)は、後席乗員が自己運転車の意思決定行動やステアリング、車線変更、減速などの経路計画をよりよく理解できるようにするための乗員指向のユーザー・インタラクション・システム。乗客は着席後、PonyHIのインターフェイスにタッチして自動運転の旅を開始。 運転中、PonyHIを通して、周囲の環境や自動運転車が認識している走行経路、様々な道路状況下での自動運転車の迅速かつ正確な反応を明確に確認することができる。
- PonyDashは、配車注文の詳細、ルート計画、バックグラウンドメッセージ、障害報告などをカバーし、ロボタクシーサービスモジュールの表示を強化する。
標準化された生産
2020年11月6日、Pony.aiは、スケールアップした自律走行システムの生産ラインを立ち上げた。 ポニースマートは全ライフサイクルコンセプトを採用し、サプライチェーン管理、ハードウェアモジュールの設計と検証、テスト生産、車両の変換と最終組立、全体的な品質検査、オフラインでのキャリブレーションから実地テストに至るまで、すべての側面を開放し、自律走行ソフトウェアとハードウェアシステムの標準化された有益な生産プロセスを確立している。
標準化された生産では、ポニースマートは車両グレードの設計開発プロセスを採用し、車両コンピューティングプラットフォームとPIDC信号光認識カメラを含む24のコアハードウェアモジュールを独自に開発することで、コスト管理と設計の統合を実現し、車両の運転シナリオにおけるモジュールの適応性と安定性を向上させていると同車は説明している。同社によると、成熟したサプライチェーンを数多く蓄積しており、入荷検査や出荷検査基準を設定することで、生産機器を品質・数量・納期で生産ラインに投入することを可能にしているという。
リーダーシップ
元BaiduチーフアーキテクトのJames Pengは、Waymoにスピンオフされる前にGoogle Xの自律走行車プロジェクトで働いていたTiancheng Louと2016年にPony.aiを共同設立した。2人は、レベル4の自律走行車を構築することを目指している。レベル4は自動車技術者協会によって定義された選択された条件の下で人間の監視なしで動作することができることを意味する。
- 共同創業者でCEOのJames Pengは元Baiduのチーフアーキテクトで、自律走行やビッグデータ、オンライン広告など複数の主要分野の技術指導を担当していたという。
- 共同創業者でありCTOでもあるTiancheng Louは、GoogleとBaiduの両方の自律走行部門に勤務した経験があり、清華大学を卒業し、コンピュータサイエンスの博士号を取得。Topcoderコンテストで10年連続優勝、Googleグローバルプログラミングチャレンジで2年連続優勝。
参考文献
- 专访Pony.ai创始人:我们如何获晨兴君联领投1.1亿美元融资. 百度. Jan 18, 2016.
- 小马智行宣布获一汽投资,将基于红旗、解放旗下车型打造自动驾驶系统. 汽车之心. Nov 3, 2020.
- Pony.ai 的基础架构挑战与实践. InfoQ. 2019年5月.
- Hengyu Zhao. Towards Safety-Aware Computing System Design in Autonomous Vehicles. arXiv:1905.08453 [cs.RO]. [Submitted on 21 May 2019 (v1), last revised 22 May 2019 (this version, v2)]
*他の出典はリンクで示した。
Photo: "SM0_0594"by RISEConf is licensed under CC BY 2.0
Special thanks to supporters !
Shogo Otani, 林祐輔, 鈴木卓也, Mayumi Nakamura, Kinoco, Masatoshi Yokota, Yohei Onishi, Tomochika Hara, 秋元 善次, Satoshi Takeda, Ken Manabe, Yasuhiro Hatabe.
コーヒー代支援 / サポーター加入
Axionは吉田が2年無給で、1年が高校生アルバイトの賃金で進めている「慈善活動」です。有料購読型アプリへと成長するプランがあります。コーヒー代のご支援をお願いします。個人で投資を検討の方はTwitter(@taxiyoshida)までご連絡ください。プロジェクトの詳細は以下を参照くださいませ。
支援プラットフォーム: https://www.patreon.com/taxiyoshida




