わずか4mWの電力で長距離を高精度で把握できる量産可能なLiDAR
サウサンプトン大学とサンフランシスコのPointcloudの研究者は、現在使用されている最先端の機械的なシステムと同等以上の性能と精度を持つ、初のコンパクトな3D LiDARを開発した。

サウサンプトン大学とサンフランシスコのPointcloudの研究者は、現在使用されている最先端の機械的なシステムと同等以上の性能と精度を持つ、初のコンパクトな3D LiDARイメージングシステムを開発した。
3D LiDARは、自律走行車の「目」となり、顔認識ソフトウェアや自律型ロボットやドローンにも使用されている。正確な画像化は、機械が物理的な世界をマッピングして相互作用するために不可欠ですが、現在必要とされている技術のサイズとコストの問題から、商用アプリケーションでのLIDARの使用は制限されていた。
チームは、わずか4mWの送信電力で70m以上の距離とミリメートルクラスの精度を達成するスケーラブルなソリッドステート3Dイメージングアーキテクチャを実証したと主張している。彼らの3.1mmの精度は、既存のソリッドステート3D Lidarよりも桁違いに高く、50メートル以上の距離で数センチの精度を実現している、と彼らは説明している。このレベルの性能は、これまでのソリッドステート3Dイメージングシステムでは手の届かなかった様々な要求の厳しいアプリケーションのニーズを満たしている。自律運転の長距離と眼の安全性の要求と、建築物や建設現場の3Dマッピングで要求されるミリメートル級の精度を同時に達成することができるという。
システムの航続距離は、送信機と受信機の位置を補正することで改善することができ、また、送信機の電力に折り目をつけることで改善することができる。後者は、シリコンフォトニック素子を最適化して伝送損失を最小化することで達成できる。より広い導波路や逆バイアスPIN接合を用いて2光子吸収を低減することで、送信電力をさらに増加させることができ、これまでの実証では約1Wの光電力に達している。またこの3Dイメージング・アーキテクチャは、自然に大規模なアレイにも対応できるようになるとチームは見込んでいる。
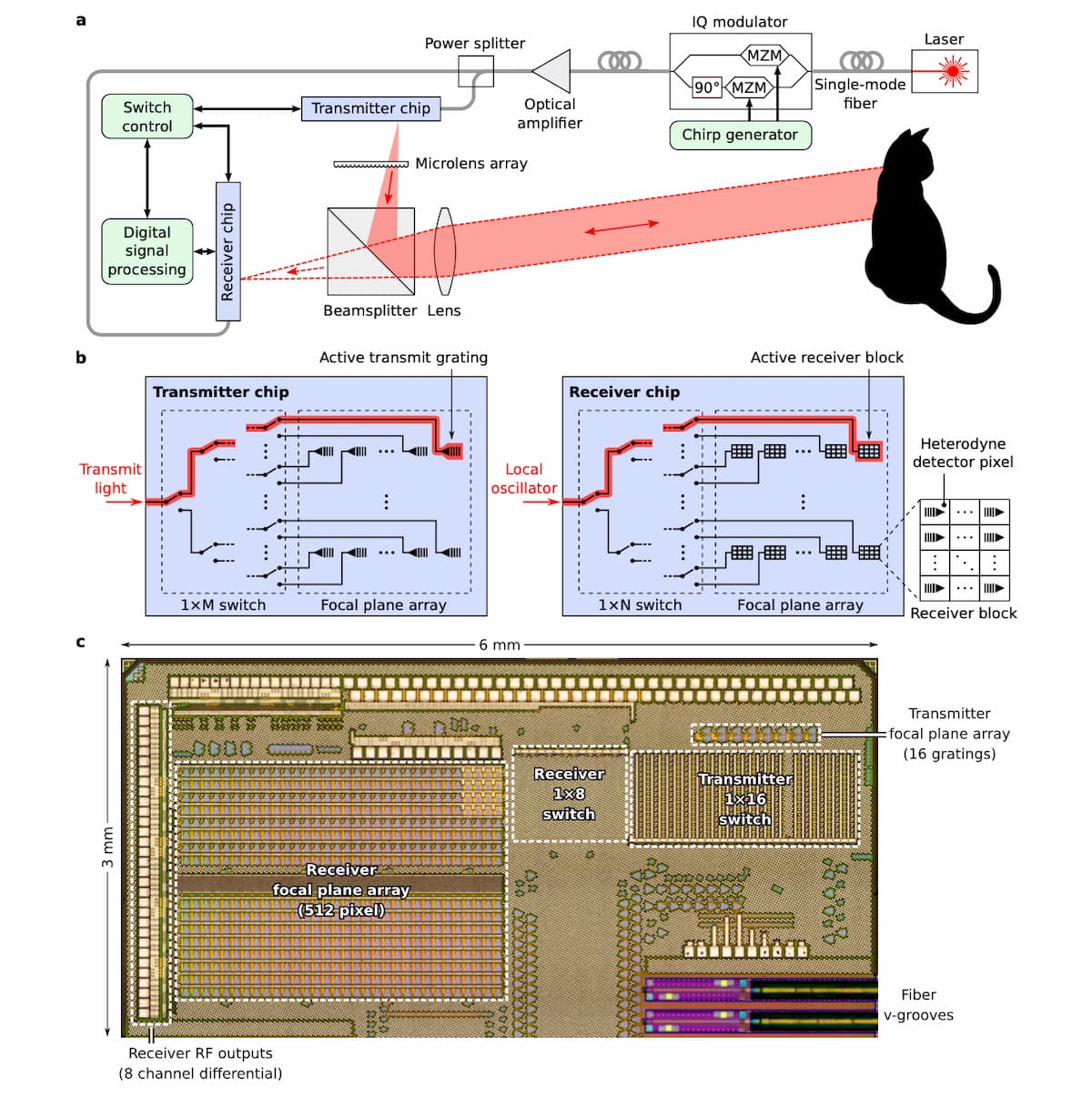
サンフランシスコのPointcloudとサウサンプトン大学のオプトエレクトロニクス研究センター(ORC)の研究者チームは、シリコンフォトニックコンポーネントとCMOS電子回路を同じマイクロチップに搭載した新しい統合システムを開発した(Lidar on a Chip)。開発したプロトタイプは、低コストのソリューションとなり、ロボット工学、自律型ナビゲーションシステム、安全性向上のための建築現場のマッピング、医療分野での使用を目的とした、低コストでコンパクトな高性能3Dイメージングカメラの大量生産への道を開く可能性がある。
 Takushi Yoshida
Takushi Yoshida
ORCのシリコンフォトニクスの教授であるGraham Reedは、「LIDARは多くの期待を寄せられてきたが、近年は必ずしもその可能性を実現できていなかった。
チームが開発したシリコンフォトニクスシステムは、これまでの他のチップベースのLIDARシステムやほとんどの機械的なバージョンと比較して、はるかに高い距離での精度を提供しており、LIDARのための非常に求められている統合システムが実行可能であることを示している。
ネイチャー誌に発表されたプロトタイプの最新のテストでは、75メートルの距離で3.1ミリの精度があることが示されている。これまでの統合システムが直面していた問題の中には、簡単に対処できる画素の高密度配列を提供することの難しさがあり、これまでは20画素以下に制限されていたが、この新しいシステムは512画素からなる初めての大規模な2次元コヒーレント検出器配列だ。研究チームは現在、画素アレイとビームステアリング技術を拡張して、実世界での応用に適したシステムを実現し、性能をさらに向上させるための研究を行っている。
FMCW LiDAR
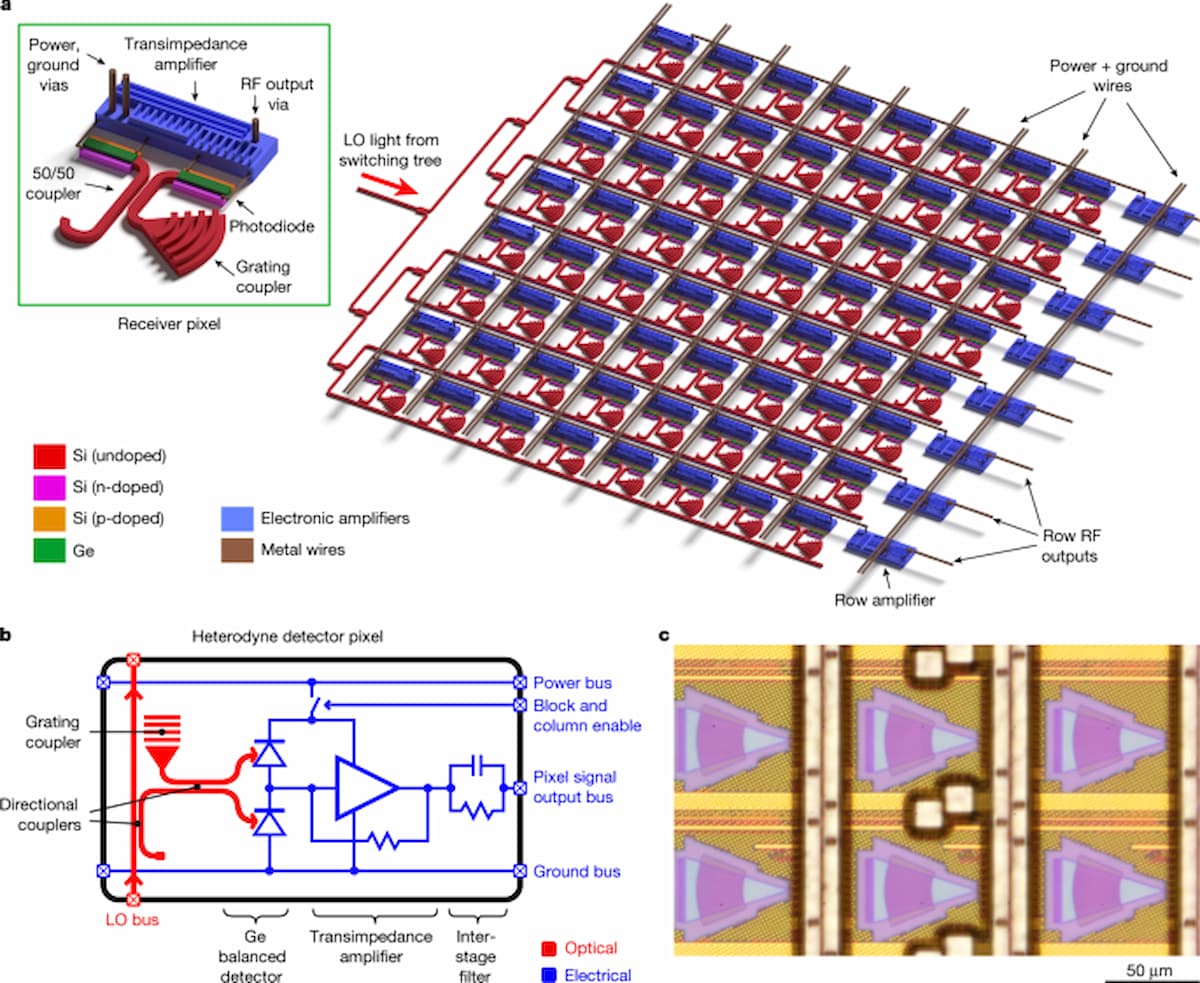
この研究はCMOSイメージセンサと同じFPAコンセプトに基づいて,完全にソリッドステートの統合型フォトニックLiDAR を実証している。光を効率的に利用することで、このシステムは、自律走行車やドローンや陸上での3Dマッピングなどの要求の厳しいアプリケーションで必要とされる範囲、奥行き精度、視野を実現している。このシステムの中心となるのが、量子ノイズ限界で動作するコンパクトな光ヘテロダイン検出器の焦点面アレイである光コヒーレント受信機である。
視野と範囲のトレードオフをなくすために、受信機は、小さなパッチでシーンを順次照らすソリッドステートのビームステアリングとペアになっている。コヒーレント受信機により、ORCらのアーキテクチャは周波数変調連続波(FMCW)コヒーレントLiDARスキームを使用して動作することができるようになる。パルス状の光を使用する飛行時間型LiDARとは対照的に、FMCW LiDARは線形チャープレーザーを使用する。ターゲットから受信した散乱光は、ヘテロダイン受信機で局部発振器光と混合され、往復の移動時間とターゲットまでの距離に比例したビート周波数を生成する。
FMCW方式は、飛行時間方式と比較していくつかの利点がある。第一に、ヘテロダイン検出は、ローカル発振器光に近い周波数の光を選択的に検出するため、太陽光や近隣の他のLiDARシステムからの干渉を受けないことだ。第二に、コヘレントLiDARは、受信した光のドップラーシフトを介してターゲットの速度を直接測定する。第三に、チャープ帯域幅とS/N比のみに依存する高い深度精度は、比較的低周波数の受信機エレクトロニクスを使用することで達成される。対照的に、飛行時間方式の場合、深度精度は受信機の帯域幅によって制限される。最後に、FMCWシステムは、光子を非常に小さく放出するため、非線形効果がピークパワーを制約するフォトニック統合に適している。逆に、飛行時間方式は短い高出力バーストで光子を放出する。
コヒーレントな受信機アレイに基づくこれまでの3Dイメージングシステムは、各ピクセルへの直接電気的接続に依存しているため、20ピクセル以下に制限されていた。スケーラビリティに対応するために、ORCらは、モノリシックに集積された高周波(RF)CMOSエレクトロニクスを搭載したシリコンフォトニクスプロセス上にLiDARシステムを実装した。高度に多重化された電子読み出しアーキテクチャがレシーバアレイに統合されており、シグナルインテグリティを維持しながら外部電気接続を最小限に抑えています。このようにして,試作した512ピクセルのアレイは,アレイのサイズを大きくすることで,任意の数のピクセル数に拡張することができる。さらに、標準的な市販のファウンドリプロセスを使用することで、最小限のコストですぐに大量生産が可能になる。
関連記事
- LiDAR戦国時代の到来. Axion Newsletter.
- Lidar on a chipとは. Axion.
- 中国のLiDARメーカーHesaiとは. Axion.
- LiDARとカメラによる自律走行車の知覚システム. Axion.
参考文献
Christopher Rogers, Alexander Y. Piggott, David J. Thomson, Robert F. Wiser, Ion E. Opris, Steven A. Fortune, Andrew J. Compston, Alexander Gondarenko, Fanfan Meng, Xia Chen, Graham T. Reed, Remus Nicolaescu. A universal 3D imaging sensor on a silicon photonics platform. Nature, 2021; 590 (7845): 256 DOI: 10.1038/s41586-021-03259-y
Special Thanks to Supportes.
Shogo Otani, 林祐輔, 鈴木卓也, Mayumi Nakamura, Kinoco, Masatoshi Yokota, Yohei Onishi, Tomochika Hara, 秋元 善次, Satoshi Takeda, Ken Manabe, Yasuhiro Hatabe, 4383, lostworld, ogawaa1218, txpyr12, shimon8470, tokyo_h, kkawakami, nakamatchy, wslash, TS, ikebukurou, 太郎, bantou.
700円/月のサポーター
Axionは吉田が2年無給で、1年が高校生アルバイトの賃金で進めている「慈善活動」です。有料購読型アプリへと成長するプランがあります。コーヒー代のご支援をお願いします。個人で投資を検討の方はTwitter(@taxiyoshida)までご連絡ください。


投げ銭
投げ銭はこちらから。金額を入力してお好きな額をサポートしてください。



