化学
感度10倍の超薄型ひずみゲージで医療ロボット実現に弾み
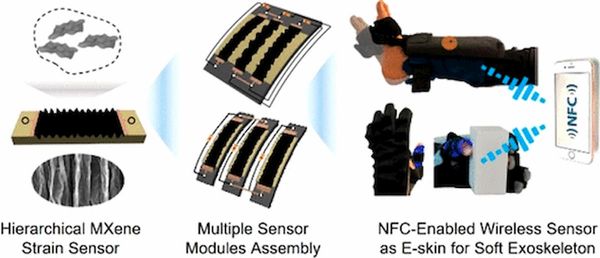
シンガポール国立大学(NUS)の研究チームは、微小な動きを測定する際に10倍の感度を発揮するひずみゲージを開発したと発表した。これらのセンサは超薄型で電池不要、無線でデータを送信できるため、幅広い用途に魅力的なセンサとなっている。
ロボット工学は、コンピュータ科学と工学の接点にある学際的な研究分野。ロボット工学には、ロボットの設計、構築、操作、使用が含まれます。ロボティクスの目標は、人間の日常生活を支援し、誰もが安全に過ごせるようなインテリジェントな機械を設計することです。ロボティクスは、情報工学、コンピュータ工学、機械工学、電子工学などの成果を活用しています。 ロボティクスは、人間の代わりとなり、人間の行動を再現できる機械を開発します。ロボットは様々な状況や目的で利用されていますが、現在では危険な環境(放射性物質の検査、爆弾の検知・不活性化など)や製造工程、人間が生存できない場所(宇宙、水中、高熱、危険物や放射線の浄化・封じ込めなど)での利用が多くなってきています。ロボットはどのような形態をとることもできますが、中には人間に似せて作られたものもあります。これは、通常、人間が行う特定の複製行動でロボットを受け入れるのに役立つと言われています。そのようなロボットは、歩行、持ち上げ、発話、認知、またはその他の人間の活動を複製しようとします。
化学
シンガポール国立大学(NUS)の研究チームは、微小な動きを測定する際に10倍の感度を発揮するひずみゲージを開発したと発表した。これらのセンサは超薄型で電池不要、無線でデータを送信できるため、幅広い用途に魅力的なセンサとなっている。

強化学習
カリフォルニア大学バークレー校のピーター・アビール教授たちは、最先端の技術を活用して、「非常に」サンプル効率の高いロボット操作モデルのトレーニングを実現するフレームワーク「Framework for Efficient Robotic Manipulation (FERM)」を開発した。
ロボティクス
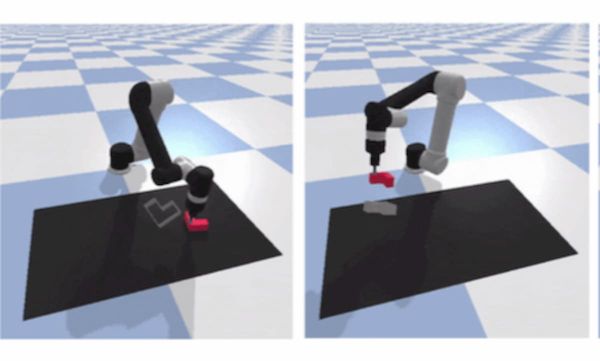
Googleの研究者たちは、物体を把持するロボットが、オブジェクト中心の仮定なしに、視覚ベースの操作のための空間構造を保持するシンプルなエンドツーエンドモデルアーキテクチャであるTransporter Networksを開発したと発表した。

ロボティクス
Nvidia、カリフォルニア工科大学、テキサス大学オースティン校、カナダのトロント大学ベクター研究所の研究者は、従来のモデルベースの歩行制御よりもエネルギー効率が高く、適応性に優れた4本足ロボットを制御するためのフレームワークを開発した。

ロボティクス
国際ロボット連盟(IFR)の「World Robotics 2020 Industrial Robots」によると、世界の工場で稼働している産業用ロボットは270万台を記録し、12%増となった。新型ロボットの販売台数は、2019年に世界で37.3万台が出荷され、高水準を維持している。これは2018年と比較すると12%減少しているが、それでも過去3番目に高い販売台数を記録している。
ロボティクス
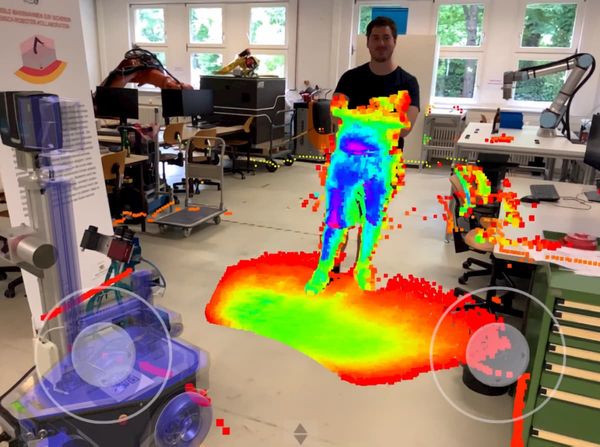
カールスルーエ工科大学の研究者たちは、ロボット工学ソフトウェアフレームワークのための可視化ツールとして、モバイルデバイスやMicrosoftのHoloLensのようなヘッドアップディスプレイ用の拡張現実(AR)アプリを開発した。
ロボティクス
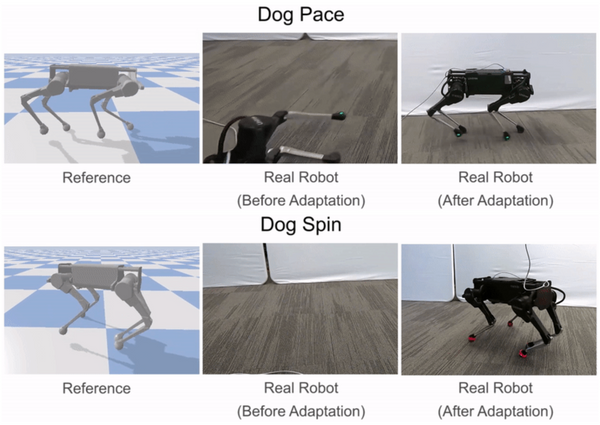
Googleの研究者たちは、模倣学習を利用して、自律型四足歩行ロボットにペースや回転、より機敏な動き方を教えた。センサーから記録されたモーションキャプチャデータのデータセットを使用して、従来のロボット制御では実現が困難な、いくつかの異なる動きを教えた。https://www.axion.zone/robots-learning-to-move-like-animals/

ロボティクス
MIT航空宇宙学助教授ルカ・カルローンらは人間が世界を知覚し、ナビゲートする方法をモデルにした、ロボットのための空間知覚の表現を開発した。ロボットは、人、部屋、壁、その他の構造物などのオブジェクトとその意味的ラベルを付け、ロボットがその環境で見ているであろうものを含む周囲の3Dマップを素早く生成する。